
L-Bracket

Battery

Rev Expansion Hub
Channel Plate

ReveNest Motors (40's, 60's, 20's)
Plexiglass

Compliant Wheels

Flex Tubing
|
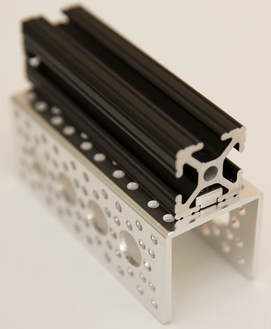
Extrusions

Chains

Mecanum Wheels

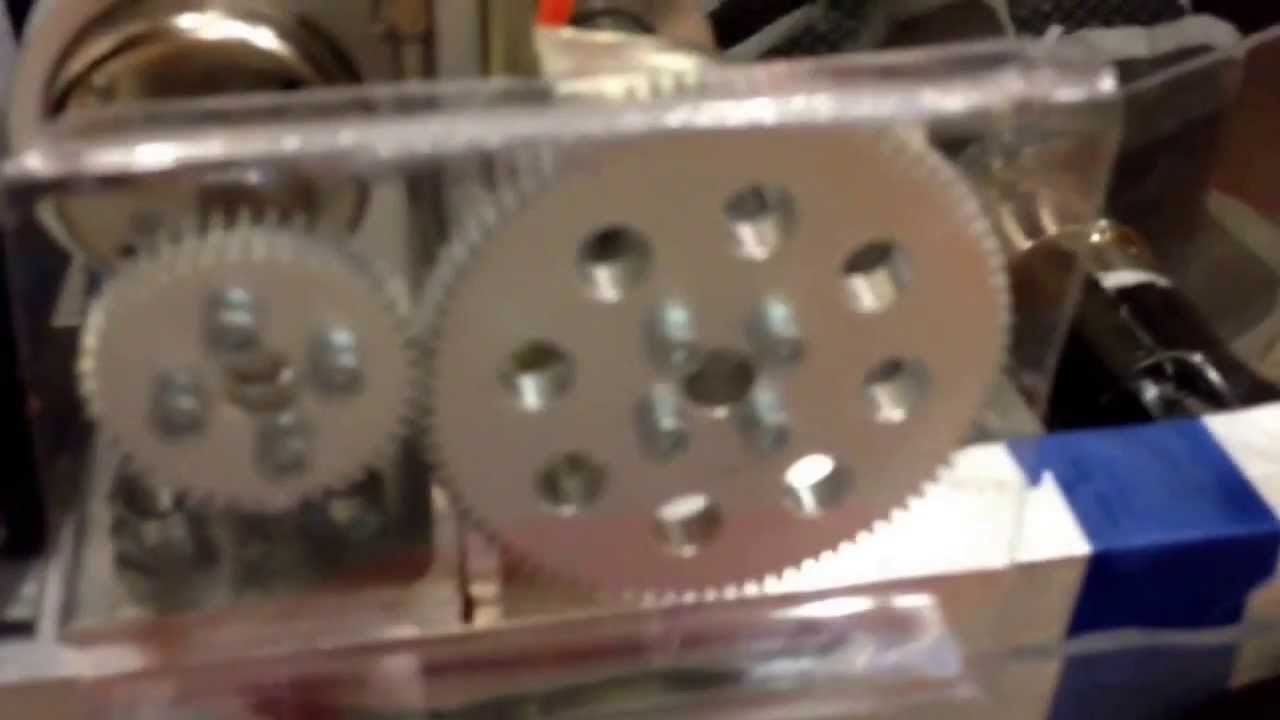
Gears

Set Screw
Collar Clamps
|
FTC TEAM 10195 NIGHT OWLS
